

ENTRY LEVEL
The Orbit Mobile Mapping Feature Extraction product is the entry level product of the Desktop portfolio, aimed for users that need manual extraction methods to convert features into objects. It gives full control and power to every user, having full access to large datasets with extremely simple interaction. A smart set of displaying and measuring tools givers every user the opportunity to browse through all types and sizes of mobile mapping content in very little time.
IMPORT YOUR MOBILE MAPPING DATA
TEMPLATE BASED

Orbit Mobile Mapping supports all known mobile mapping hardware systems, translating different device setups and specifications into a single user friendly environment. With templates tuned to each vehicle setup, MM Manager makes import, conversion and optimization very simple.
OPTIMIZE MOBILE MAPPING VIEW
SWITCH EASILY BETWEEN 3D, STEREO, ISOMETRIC & PANORAMIC VIEW
Impress yourself: switch your view from 3D to the nearest panorama! Use the anaglyph stereo mode to get a real 3D impression of your pointcloud. And finally, use the isometric mode for a more technical approach.
REGISTER ANY FEATURE
REGISTER NEW MEASUREMENTS IN ANY LAYER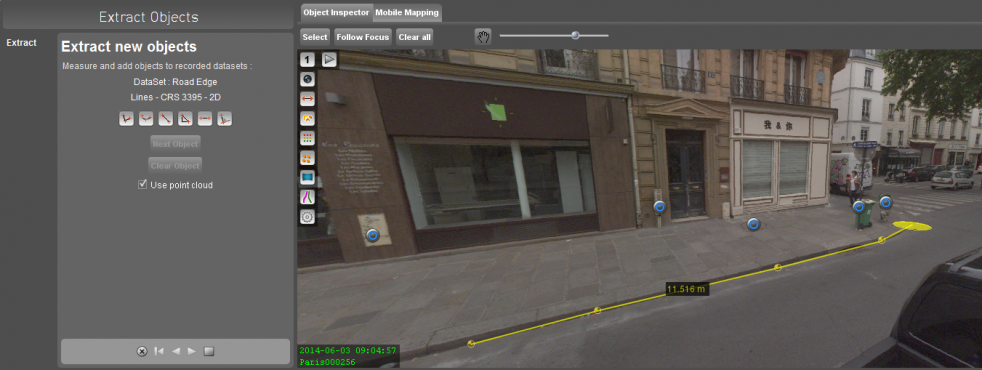
MM Feature Extraction provides all tools required for measurements and registration in any layer.
Define or import layers in which measured features must be added and complete by filling in attribute values.
SUPPORTS ALL SYSTEMS
ALL IMAGERY, UNLIMITED POINTCLOUD SIZE
Orbit Mobile Mapping solutions support all mobile mapping systems such as Topcon, Riegl, Trible, Leica, Optech, Cyclomedia, FIS, Trimble, earthmine, LidarUSA and more. It also supports a generic import for panoramic and planar images, and pointclouds with unlimited size.
Import procedures are tuned for each individual vehicle setup, including lever arm corrections, lens calibration, coordinate reference system and more. Templates for vehicle setups can be downloaded.
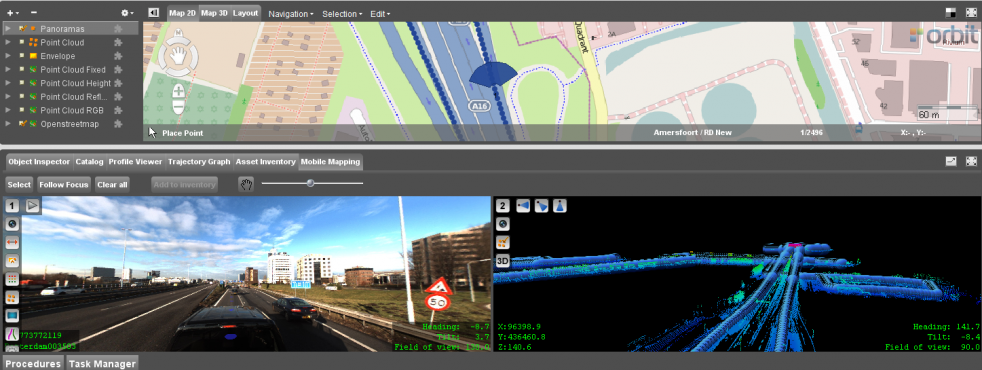
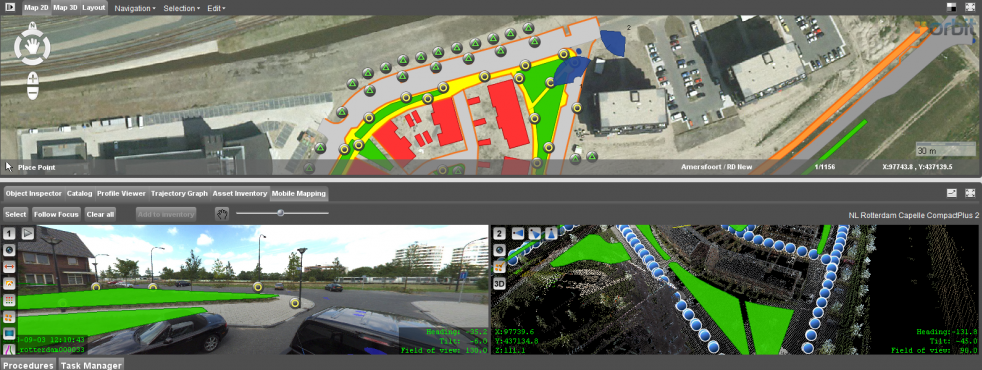
UNCHALLENGED VIEWING
FULLY INTEGRATED IMAGERY AND POINTCLOUD, NO LIMITATIONS
supports fully integrated viewing of imagery, planar and spherical, and pointclouds
hassle free navigation
quick views for top, bird and street viewing angles
jump in and out images
perspective and isometric 3D, view poincloud in anaglyph stereo
supports overlay of vector data in imagery and 3D
powerful pointcloud colorization, selection, clipping, highlighting, export
AUTOMATIC SURFACE, RIDGE & CORNER RECOGNITION
SPEED UP AND PRECISE YOUR FEATURE EXTRACTION
Use the preference box to optimize your hover behaviour. Colorize hoover to visualize information about the underlying pointcloud, track surfaces, ridges and corner, snap to nearest point, interpolate between points, … ! In other words, precise the hover exactly in your way depending on your workflow needs.
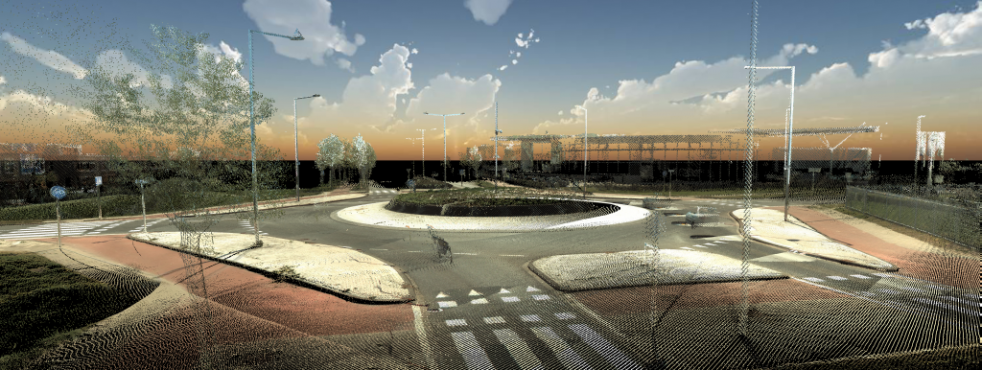
HIGHER THE STANDARDS OF YOUR VIEWS
MAKE AN IMPRESSIVE POINTCLOUD SHOT WITH BACKGROUND
OVERLAY ALL GEODATA
INTEGRATE GIS DATA IN MOBILE MAPPING VIEW
Supports 2D and 3D vector data
Set Transparency, View depth, Height adjustment
WALK THROUGH
EASY STEP FROM IMAGE TO IMAGE, AUTOPLAY
Integrated autonomous play/stop functionality to go step by step through your project.
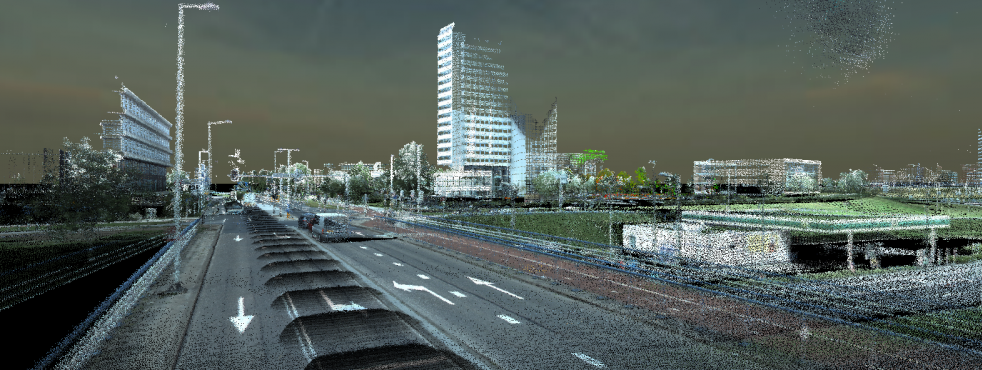
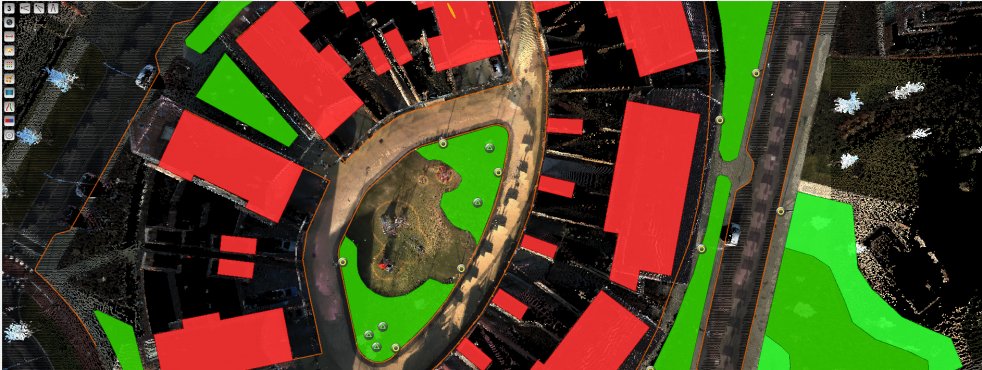
POINT CLOUD COLORISATION
DISPLAY THE POINT CLOUD IN NUMEROUS WAYS INCLUDING RGB
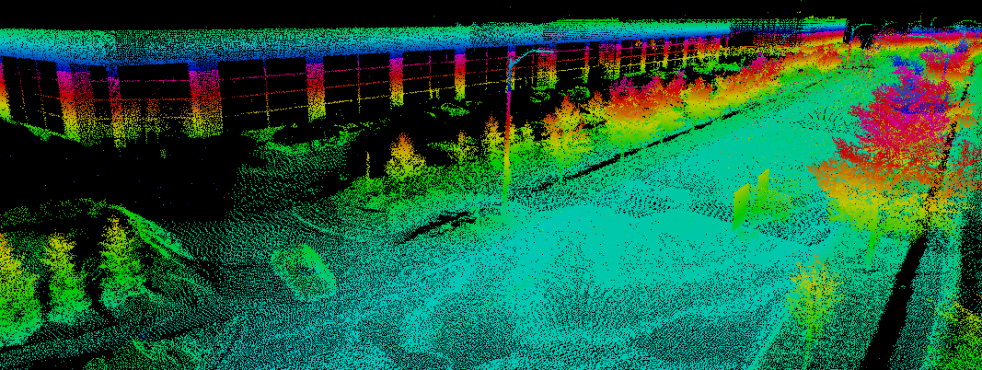
Add Reflection sensibility to each colorisation method.
visible or fixed color range view
pixelsize adjustment, fill point cloud option
transparency slider
view depth slider
(dynamic) thinning options
MULTIFUNCTIONAL 2D COMPONENT
INTEGRATED VIEW AND EDIT FOR GIS DATA
View 2D and 3D GIS vector data
View GIS image data
Combine vector and image layers
Define legends

SUPPORT FOR ALL COORDINATE SYSTEMS
OVER 3000 CRS AND HEIGHT CRS
Supports any Geographic, Geocentric and Metric projected coordinate systems.
Supports EPGS library
Supports *.prj file CRS definitions
POWERFUL MEASUREMENT TOOLS IN 3D
POINTS, DISTANCES, LINES, AREAS AND MORE
Point cloud measurements as well as measurements based on triangulation are supported. Measurement of position, point drop, distance XY, XYZ, Z, perpendicular distance, distance to reference plane, free polyline, catenary curve, free area, rectangular vertical or horizontal area, squared volumes, etc.